计算机视觉基础: Filtering (滤波)
Introduction
在数字图像处理中,滤波是一个基本且关键的操作。滤波不仅用于增强图像质量,还在诸如去噪、边缘检测和图像分割等高级任务中扮演着重要角色。本文将简单的探讨线性与非线性滤波的基本概念、实现方法及其在计算机视觉中的应用。
现实图像在数字世界的表示
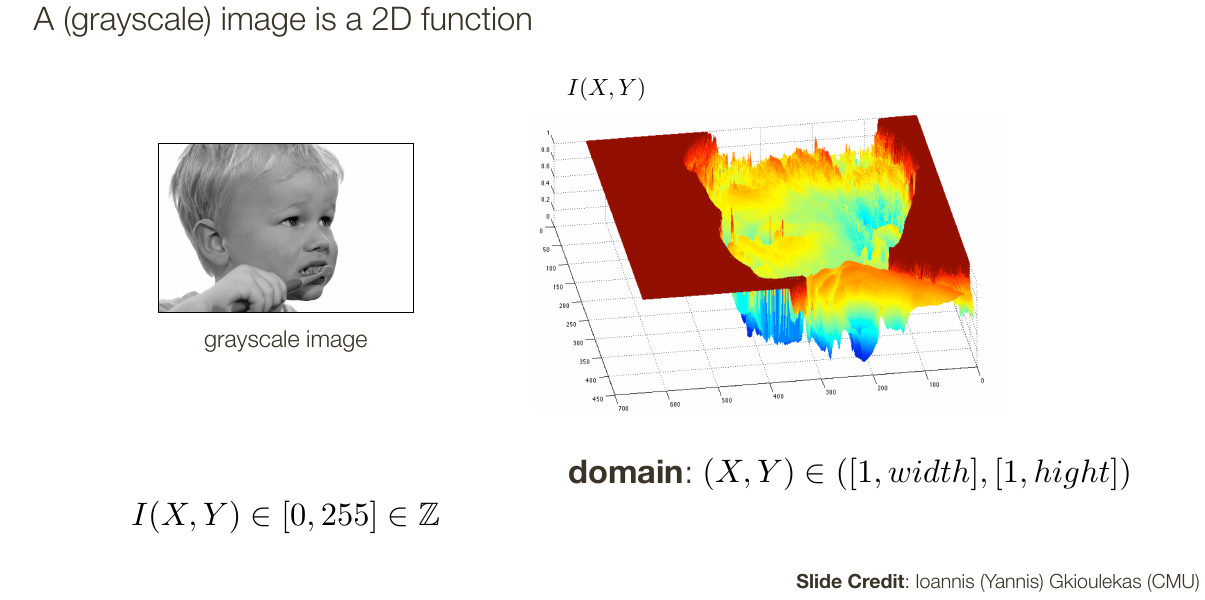
我们知道,图片实际上就是一个颜色的强度在一个点阵上的值,比如灰度图可以说成是一个点阵上每个点上的光线强度。彩色图,通常就是一个点阵里每个点上红光绿光蓝光(RGB)的光线强度。而这个强度值在计算机中通常用uint8,也就是0-255表示。
比如我们拿灰度图做例子,即只有一个通道,大小为M x N的图片,就可以很自然的表示为 I(X, Y),其中 (X, Y) ∈ ([1, M], [1, N])
图像的处理
获得图像的数学表示后,我们可以通过数学运算对图像进行各种处理。根据操作是针对函数的定义域(domain)还是值域(range),图像处理操作大致可以分为以下两类:
Warping (变形)
变形操作涉及对图像的空间结构进行修改,如旋转、缩放和扭曲。这类操作改变了函数的定义域,使得图像在几何上发生变换。例如,图像校正就是一种变形操作,它用于消除镜头畸变,确保图像中的直线在变换后仍然保持直线。
Filtering (滤波)
滤波操作则是对图像的像素值进行修改,改变函数的值域。这类操作包括图像增强(如锐化、对比度调整)以及特定问题的解决(如模式识别、对象检测)。
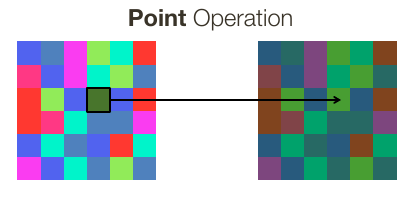
Point Operation (点运算)
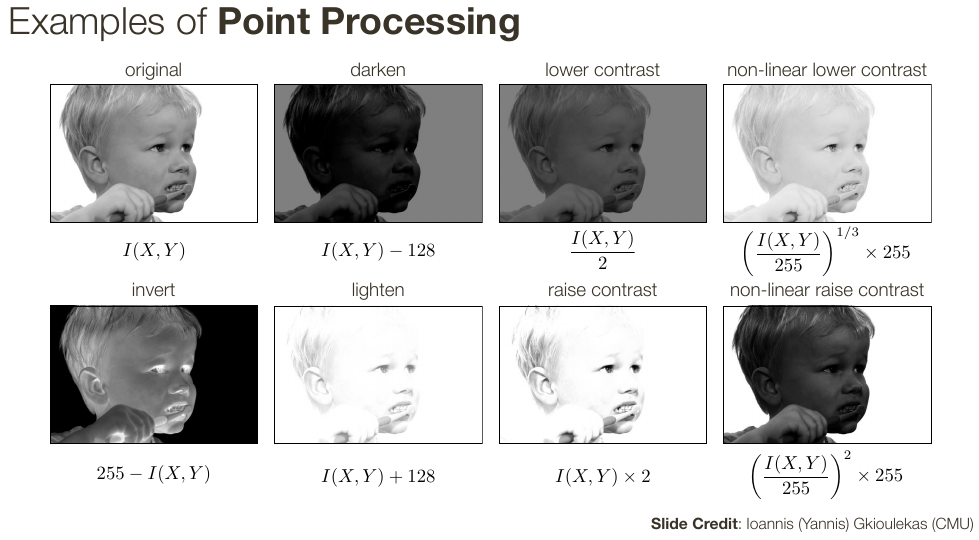
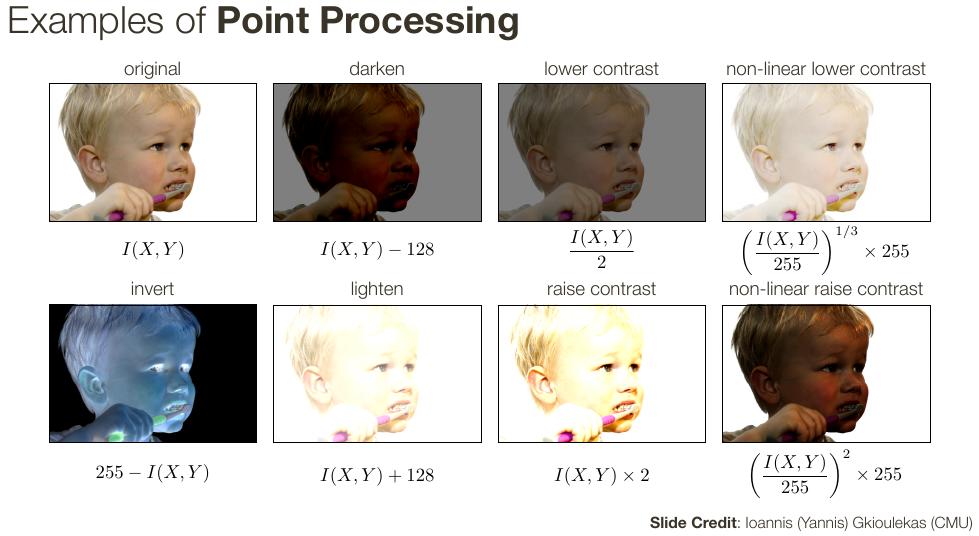
点运算是最基本的滤波操作,它对图像中的每个像素独立应用一个函数:
Credit: Ioannis (Yannis) Gkioulekas (CMU)
其中 是应用于每个像素值的操作。例如:
- 可以使图像变暗;
- for 可以降低对比度;
- for 可以增加对比度。
Neighborhood operation (邻域运算)
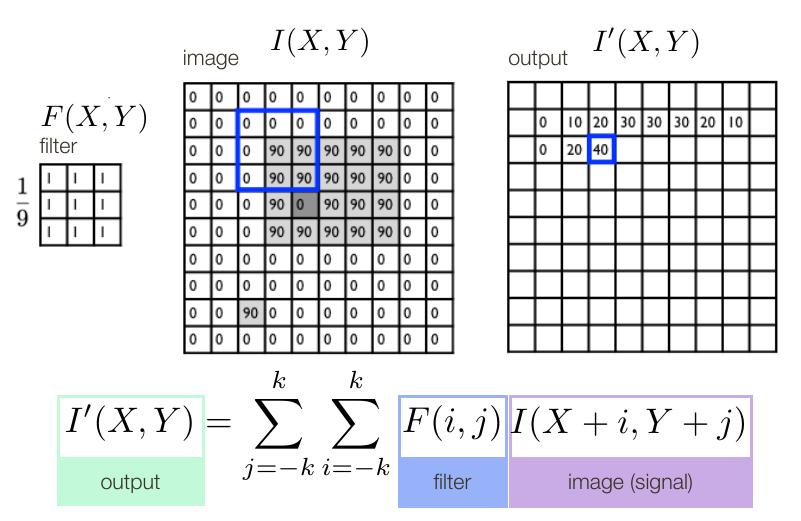
邻域运算则考虑像素周围的邻域信息,对输出像素进行计算:
Credit: Ioannis (Yannis) Gkioulekas (CMU)
这里,, 是邻域的大小,且一般来说假设M为奇数,假设 M 为奇数的主要可以让滤波更加的简单直观。例如,无论从左到右还是从右到左,应用奇数尺寸滤波器的结果都是一样的。
同时邻域运算比点运算更强大,因为它考虑了局部区域的信息。
Linear Filter (线性滤波)
但不管是点运算还是邻域运算,这些操作都可被分为线性(linear)和非线性(non-linear)。
其中线性滤波是滤波操作中最常见的一类,它通过一个线性滤波器(Kernel)对图像进行处理。滤波器通常表示为一个 的矩阵 ,其中心位于滤波器的中心位置。线性滤波的输出可以通过相关运算或卷积运算来实现。
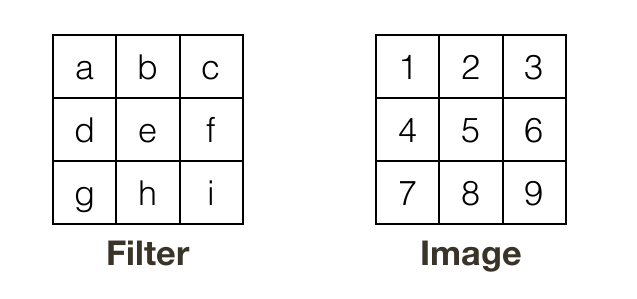
Correlation
Correlation是线性滤波的一种基本形式,计算方式如下:
复杂度
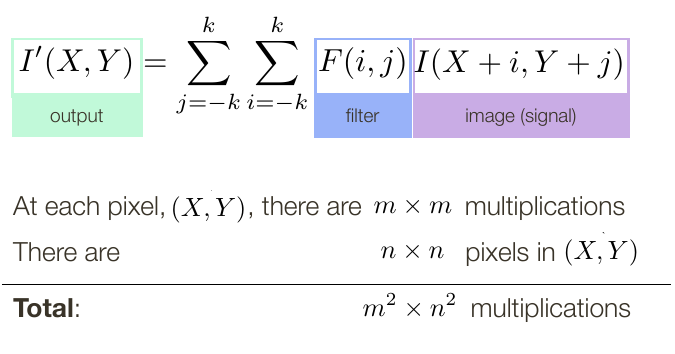
如果m不是很大,那么复杂度为,
如果m接近n,那么复杂度为
Convolution (卷积)
卷积(Convolution)是一种类似与Correlation的数学运算,但是他有更多数学上的特性。
在实际操作中,通常通过旋转滤波器180度后再进行Correlation来实现卷积。
或者可以表示为:
比较Correlation和Convolution
如果是Correlation,那么
如果是Convolution,那么
Boundary Effects (边际效应)
其实我们可以发现,当滤波器放置在图像边缘附近会导致滤波器部分超出图像范围

为处理这种情况,常用的方法包括:
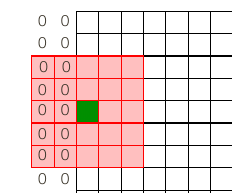
- 忽略边界 (Ignore/discard):不对边界区域进行运算,但是这种方式会导致输出图像比输入图像小。
- 零填充 (Zero Paddings):在图像边缘填充零值,使输出图像与输入图像大小相同,但可能引入边界伪影。
![]()
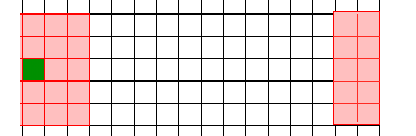
- 假设周期性 (Assume periodicity):将图像视为周期性延展,滤波器超出部分从另一边“绕回”图像。
![]()
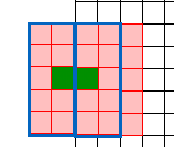
- 边界反射:通过反射图像边缘的像素值来填充,使边界区域更加平滑。
![]()
卷积的数学特性
前面说到,卷积有很多很好的数学特性。
其中结合律和对称性为卷积独有,前四个特性Correlation也有。
Superposition (叠加性)
假设 和 是两个相同尺寸的滤波器,则:
Scaling (缩放性)
假设 是一个滤波器, 是一个scalar,则:
Shift Invariance (平移不变性)
卷积运算的输出仅依赖于滤波器覆盖区域的像素值,而不依赖于滤波器在图像中的具体位置。这意味着如果输入图像平移,输出图像也会以相同的方式平移。
Associativity (结合律)
假设 和 是两个滤波器,则:
Symmetry (对称性)
假设 和 是两个滤波器,则:
常见的线性平滑滤波
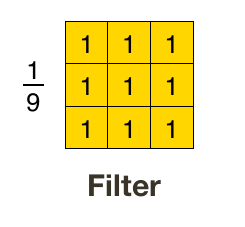
Box Filter (箱式滤波器)
又被称为平均滤波器 (average filter or mean filter),简单来说就是把一个方形范围内的像素值做平均就行了。
非旋转对称,可分离
然而,箱式滤波器在模拟几何模糊(如焦外模糊)方面表现不佳,因为它将图像中的点扩散为方形区域,而非更自然的圆形或椭圆形。
评价为超级兵
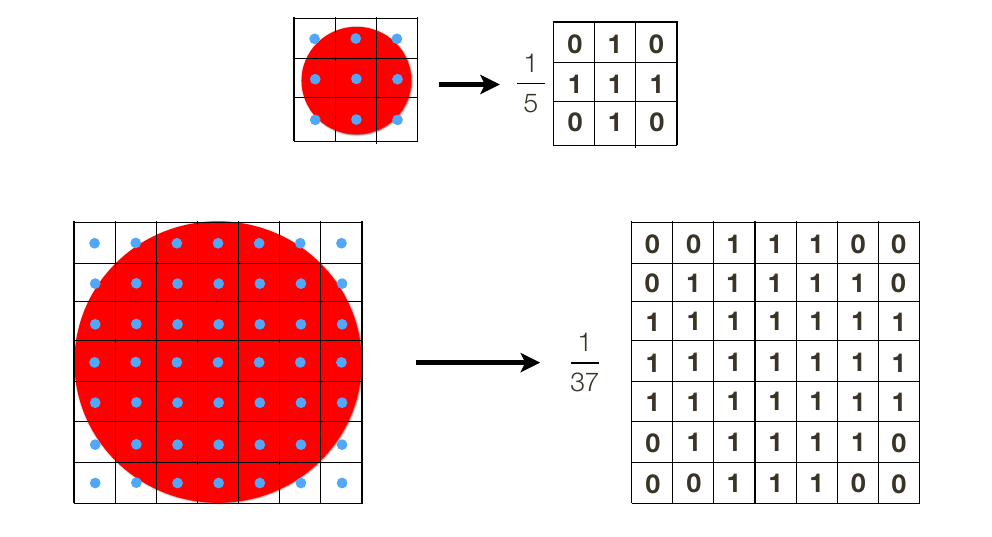
Pillbox Filter (柱状滤波器)
柱状滤波器类似于箱式滤波器,但它在圆形邻域内进行均值计算,而不是方形邻域,所以比较适合模拟几何模糊
旋转对称,不可分离
评价为超级兵
Gaussian Filter (高斯滤波)
评价为重量级滤波器,没有高斯滤波我都不知道这课要怎么上
旋转对称,可分离,非常好低通滤波(low pass)
其中参数 为控制滤波器的扩散程度的参数。
- 越大,平滑程度越高,每个像素的贡献率也会随着距离的增加而逐渐下降。 距离。
- 越小,平滑程度越低,邻近像素的贡献度下降越快。
- 如果 非常小,则完全不会产生模糊/平滑效果。
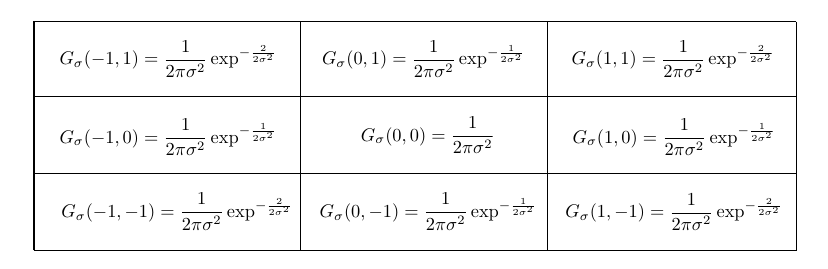
比如一个3x3的高斯滤波就可以这么计算
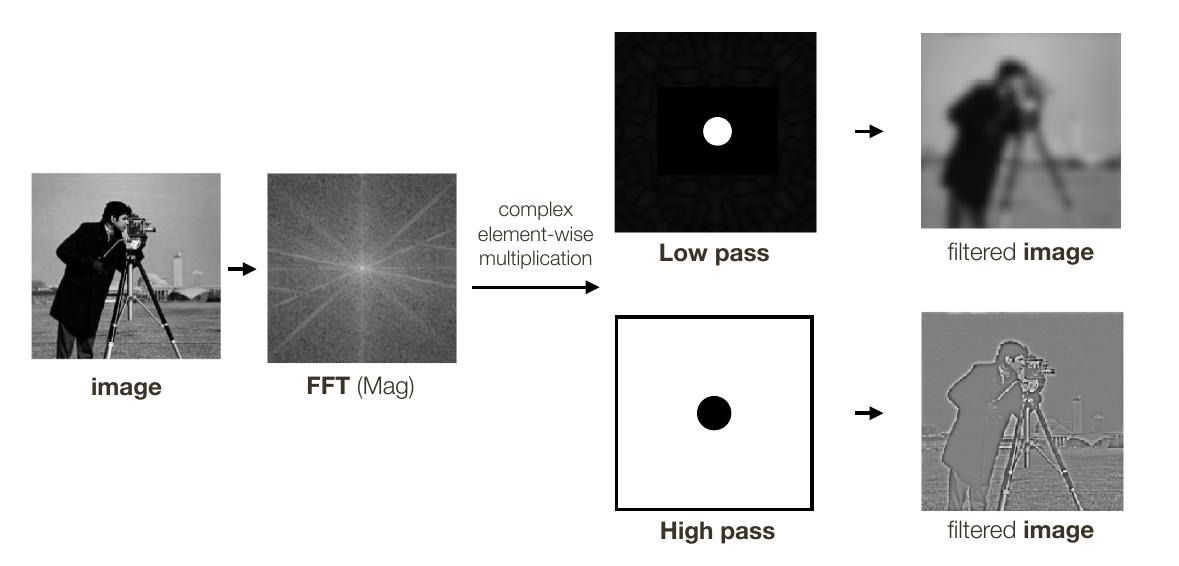
低通和高通滤波
高效实现卷积
前面提到了,直接进行卷积/Correlation的时间复杂度为 , 对于大规模图像和滤波器,这种方法效率较低。为提高效率,可以采用以下两种方法:
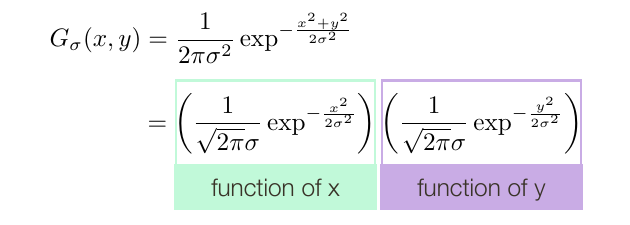
Separability (分离再相乘)
对于可分离的高维滤波器,可以把这些滤波器表示为多个一维滤波器的叉积(cross product)。
例如,高斯滤波器是可分离的,可以先对图像的行进行一维高斯滤波,再对列进行一次一维高斯滤波,最后做叉乘


当然并不是所有的滤波器都是可以分离的,比如box和gaussian是可以分离的,但是pillowbox就不行
那么这种情况的的复杂度是多少呢,假设二维
- 每个像素需要的操作:次相乘,一次x,y
- 总共 个像素
所以时间复杂度为
所以分离再乘可以把计算复杂度从 降低到 。
Convolution Theorem (卷积定理)
根据卷积定理,我们可以把如下的卷积过程
丢到傅立叶空间
其中,, , 分别为经过傅立叶变换后的, 和
最后再通过iFFT就可以得到卷积后的图像了。
那么这种情况的的复杂度是多少呢
- 对图像做傅立叶变换:
- 对滤波器做傅立叶变换:
- 相乘:
最终的复杂度: (至少要比好,笑)
Non-Linear Filter (非线性滤波)
Median Filter (中值滤波器)
就是取中间值,简单的去噪滤波器
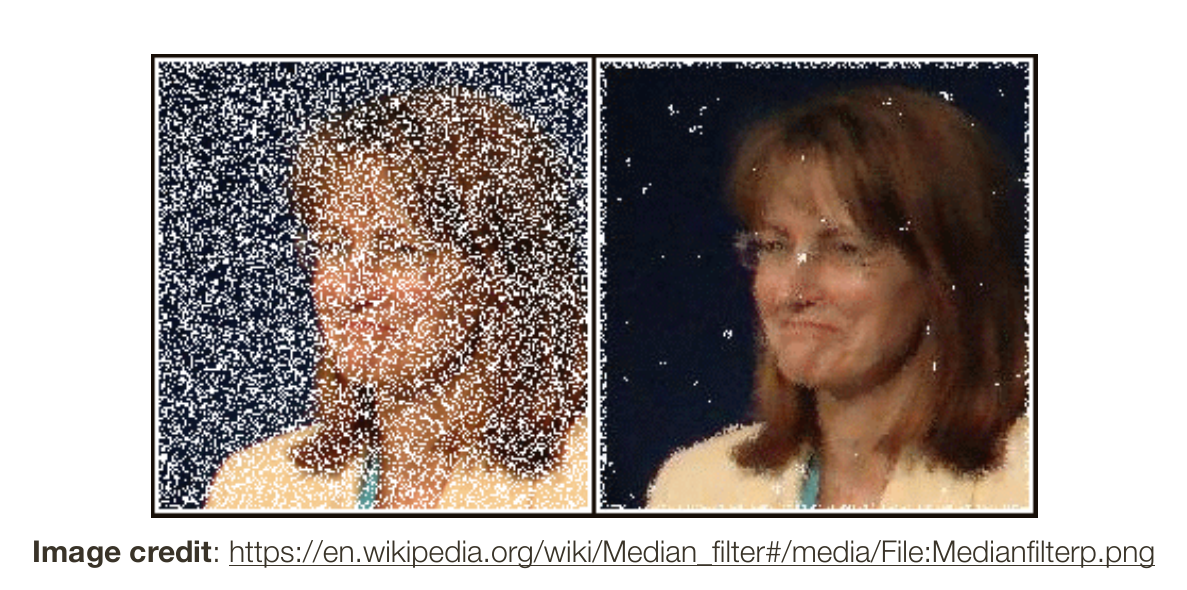
去噪
Bilateral Filter (双边滤波器)
和高斯滤波器相同,但是不同的像素会有不同的权重。
- 空间距离: 离中心像素越近的像素会有更高的权重,距离越远则权重越低
- 像素距离:双边滤波器还依赖于像素值的相似性,即越相似的像素会有更高的权重
因为要计算权重,所以这个滤波器的消耗比较多。

双边滤波器广泛应用于图像去噪、细节增强和艺术效果生成等领域。例如,连续应用双边滤波器可以产生“卡通化”效果。
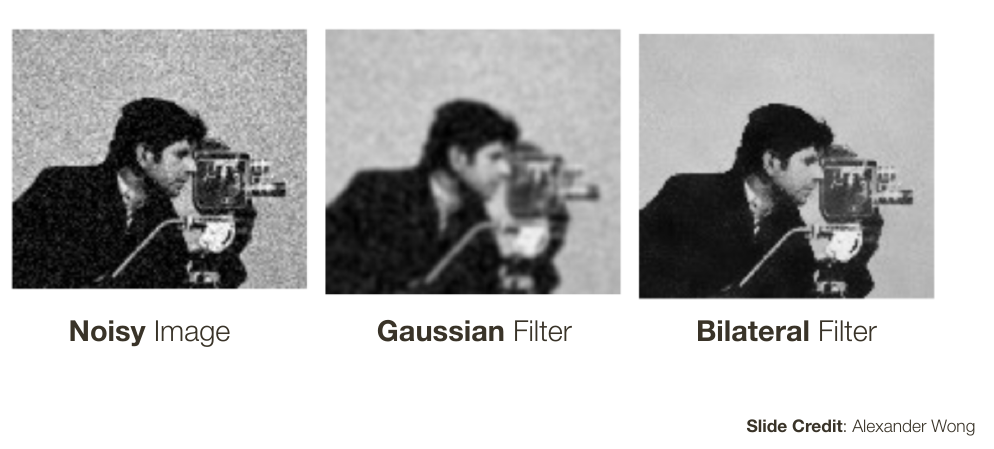
去噪
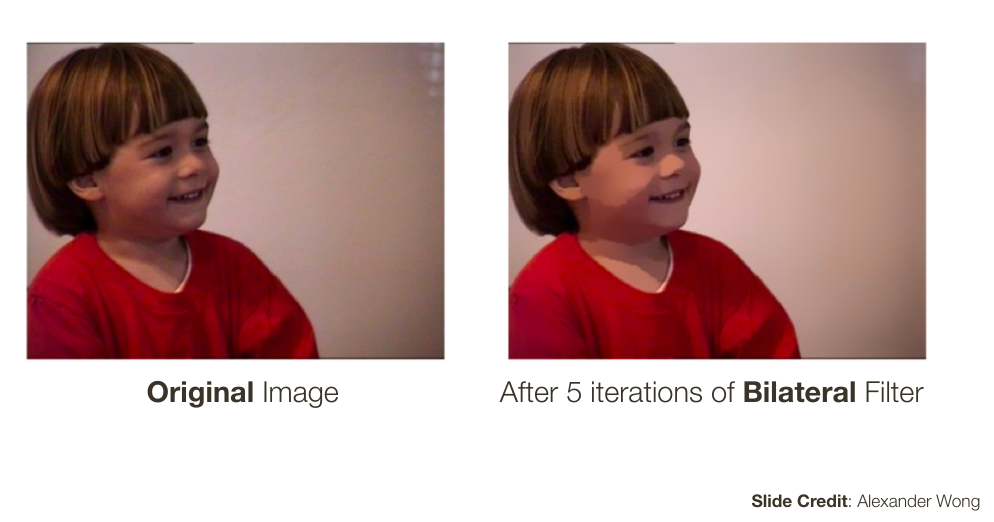
卡通化
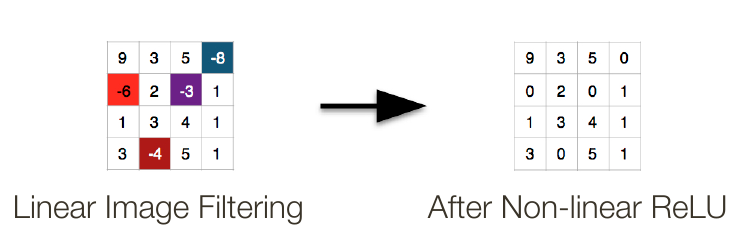
ReLU - Rectified Linear Unit
就是把小于0的都变成0,在CNN中通常作为激活函数出现。
Reference
- Unless specified, all photo are coming from UBC CPSC425 slides @ Leonid Sigal
- My class note from UBC CPSC425